
|
|||||||
|
|||||||
|
||||||
|
||||||
|
||||||||||||
|
||||||||||||
|
|||||||||
|
|||||||||
|
|||
|
|||
|
|||||||||||||
|
|||||||||||||
|
|||||||||
|
|||||||||
|
||
|
||
|
|||||
|
|||||
|
||
|
||
|
|||
|
|||
|
|||
|
|||

上海中人专业提供ZRJQR-888机器人综合实训台,是专业的教学星空(中国)生产厂家,我们欢迎您来我们生产基地考察ZRJQR-888机器人综合实训台,并为您提供专业的解决方案。教学星空(中国)可以解决教师教学缺少平台,学生缺少实操经验的难题。ZRJQR-888机器人综合实训台,是中人公司的品质效益保障教学产品。 文章内容中的图片为参考图片,仅供参考,以实物为准.
本文关键词:ZRJQR-888机器人综合实训台 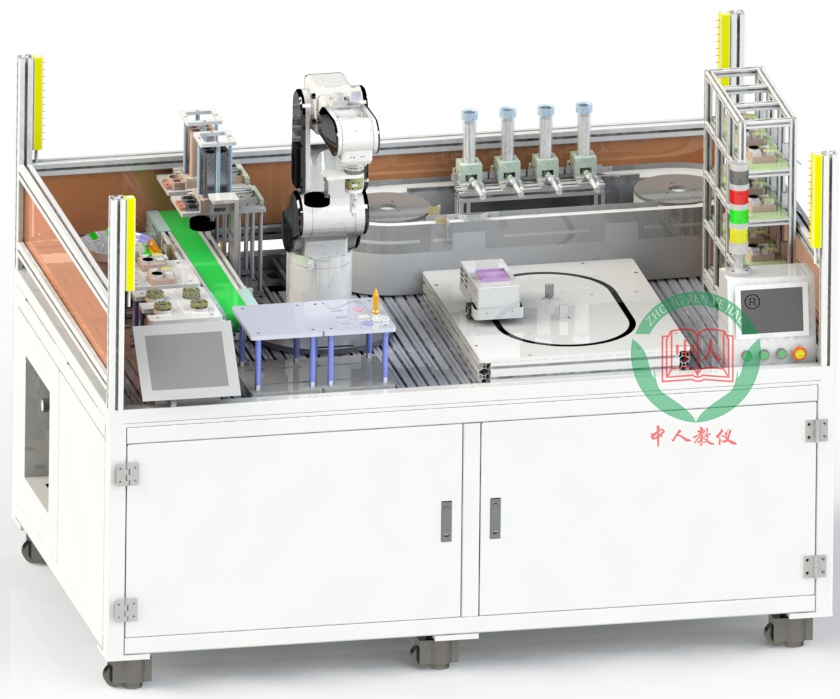
一、简介
本实训台包含六自由度工业机器人、智能视觉检测系统、RFID数据传输系统、PLC控制系统、机器人基础教学系统,及一套供料、AGV智能物流输送、机械人装配、视觉检测、智能仓储组成。可以实现对高速传输的工件进行分拣、RF检测、搬运、装配、视觉检测、存储等操作。
本实训台各组件均安装在型材桌面上,机械结构、电控制回路、执行机构相对独立,采用工业标准件设计。通过此平台可以进行机械组装、电气线路设计与接线、PLC编程与调试、智能视觉流程编辑、工业机器人编程与调试、RFID数据传输、AGV智能物流输送、智能仓储等多方面应用训练,适合职业院校、技工学校自动化类相关专业《工业机器人与控制技术》、《自动化技术》等课程的实训教学,适合自动化技术人员进行工程训练及技能比赛。
产品规格:
1、输入电源:单相三线~220V±10%50Hz
2、工作环境:温度-10℃~+40℃相对湿度≤85%(25℃)
3、装置容量:<1.5kVA
4、实训平台尺寸:2000mm×1200mm×1500mm
5、安全保护:具有漏电保护,安全符合国家标准
二、系统组成
机器人本体由六自由度关节组成,固定在型材实训桌上。也可选用ABB,KUKA,或其它品牌的机器人。机器人示教单元有液晶显示屏、使能按钮、急停按钮、操作键盘,用于参数设置、手动示教、位置编辑、程序编辑等操作。
2、工具换装单元
快换装置由主盘与工具盘组成,主盘安装在机器人法兰上。工具盘上安装各种工具,由吸盘工装、气动夹手工装、定位工装,组成的三工位快换单元。主盘受机器人控制,主盘前端装有传感器,用于检测前方有无物体,与工具盘高精度的对接,并将气动信号自动导入到气动工装(吸盘工装)上。
3、基础教学单元
学习机器人的坐标系,建立工件座标。通过在平面不同图形规则的图案(直线、圆形、三角形、螺旋形等线条)描绘图形,训练对机器人基本的点示教,直线、曲线运动足迹的掌握。机器人通过吸盘夹具依次把一个物料板摆放好的多种形状物料(方形、圆形、五边形、六边形、五角星)拾取搬运到到物料板的另一侧,强化对机器人点位示教技能移训练。
4、码垛单元
机器人通过吸盘夹具按要求拾取物料块进行码垛任务。物料块有长方形和正方形两种,可根据需要自由组合码垛出多种形状。练习对机器人码垛、阵列的理解并快速编程示教的应用技能。
5、拖动示教单元
机器人按装有拖动传感模块,通过拖动此传感器,可控制机器人的XYZ工具移动。通过简单界面操作,速实现图块搬运操作。
6、写字单元模块
在离线编程软件里输入文字,并生成轨迹。生成的轨迹倒入机器人,可以此单元写字。
7、可编程控制器PLC单元
配备三菱FX2N可编程控制器、数字量扩展模块、模拟量输出模块、232串行通信模块等,用于读写RFID系统的工件数据,与机器人交互通信、电机、气缸等执行机构动作,处理各单元检测信号,工作流程处理、数据传输等任务。
8、RFID数据传输系统
采用RFID数据传输系统,安装在环线输送单元的圆弧处,电子标签已埋在工件内部,检测距离为40mm。当工件从环线输送单元经过左端圆弧处时,RFID检测系统可以准确地读取工件内的标签信息,如编号、颜色、高度等信息,该信息通过工业现场数据总线传输给PLC,用来实现工件的分拣操作。
9、四工位供料单元
由井式料库、推料气缸、顶料气缸和光电传感器组成,安装在型材实训桌上,用于将工件库中的工件依次推出到环形输送线。提供不同编号、高度、颜色的标准工件,以及编号缺少笔画、杂色叠加等不合格工件。多工位的供料设计,使得供料方式多样化,可以进行单一的上料,也可以进行不同编号、高度、颜色的组合上料,以及对上料速度进行控制,实现上料形式的多样化。
10、环形输送单元
包含一套交流调速系统,由变频器、单机交流电机、环形板链(传送带)、对射传感器等组成,安装在型材实训桌上,用于传输工件。
11、智能视觉检测系统
配备一套智能视觉系统,由视觉控制器、视觉相机、视觉光源及触摸显示器等组成。用于检测工件的特性,如颜色分检、形状区别,视觉定位等。通过以太网总线连接到机器人控制器,对检测结果和检测数据进行传输。对料盒与料盖视觉检测,根据形状,判断是否为合格品。并对传输线上,对料盒料盖视觉定位,用于机器人准确的抓取。对于装配完成的工件,视觉检测装配的工件色彩是否满足要求。
12、视觉跟踪输送单元
包含一套直流调速系统,由直流电机、直流电机控制器、传输带、高精度编码器、等组成,安装在型材实训桌上,用于传输工件。当从送料器推出一个料盒或料盖时,视觉相机检测到此器件。通过跟随系统,当工件到达抓取区,机器人精确地抓取工件。机器视觉不仅可以定位工件,还可以识别工件类型。
13、产品组装单元
由工件盒送料机构及工件盖送料机构组成,通过视觉跟随传输带送出,用于装配工件。具有2个工件盒组装位置,能同时对2个工件盒进行装配操作。工件盒内设有4个工件槽用于放置工件,工件盒和工件盖通过定位销装起在一起。装配好的产品,通过视觉检测,检查产品的工件色彩是否满足要求,以及产品的尺寸是否达标。对于不良品,作上不良标识,或直接丢到费品区。机器人可以进行工件盒/工件盖装反时的修正、工件按序装配、工件拆解等操作。
14、震动盘送料单元
振动盘是一种自动定向排序的送料星空(中国),由料斗、底盘、控制器、直线送料器、等配套组成。能把定位销有序排出来,用于工件组装是,把工件盒与法兰组装在一起。
15、废品回收框
安装在型材实训桌上,用于机器人自动放置被检测出来的无用工件或不合格品。
16、智能物流AGV单元
智能物流单元由智能AGV机器人,AGV控制器组成,用于把组装好的产品,输送到智能仓库,以及从智能仓库运送原材料给机器人组装。AGV控制器通过与机器人控制器通信,获取生产完成的产品信息,或生产需要的原材料信息,自行与智能仓库对接,将所需工件运到生产线。或把组装完成的产品,通过AGV运到立体仓库入库。
17、智能仓储单元
自动化立体仓库是现代物流系统中迅速发展的一个重要组成部分,主要由立体料架、巷道堆垛机、智能仓库控制器。立体仓库由铝质材料加工而成,配有9个仓位(3×3),每个仓位有传感器识别是否有料。巷道堆垛机能够在控制器管理下,完成货物的出入库作业,实现存取自动化,能够自动完成货物的存取作业,并能对库存的货物进行自动化管理。
18、电气控制单元
用于安装机器人控制器、PLC、变频器及调速控制器等电气部件,采用网孔板的结构,便于拆装。采用抽屉式安装,方便维护。强弱电分离,连接安全可靠。
19、以太网路由器
以太网路由器将PLC、机器人控制器、智能视觉控制器组成一个以太网局域网,进行数据的相互传输,实现工业现场控制系统的高层次应用,同时可以培养和考核学生对工业网络的使用技能。
三、实训项目建议
1、工业机器人认知与基础操作;
2、工业机器人机电系统结构;
3、基本运动指令与简单程序;
4、机器人坐标系设定;
5、典型搬运码垛应用实验-夹取式;
6、典型搬运码垛应用实验-真空吸附式;
7、进阶指令教学;
8、应用偏移指令的搬运实验;
9、轨迹抛光模拟实验;
10、电气元件认知实验;
11、工具快换实验;
12、快换工具自动识别实验;
13、PLC的设计与应用;
14、机器人与PLC点对点通讯实验;
15、机器人与PLC总线通信实验;
16、基础应用综合实验;
17、智能视觉系统的认知;
18、智能视觉系统的标定与模板制作;
19、智能视觉系统的处理流程配置;
20、智能视觉颜色与尺寸测量;
21、工业机器人与智能视觉系统通信;
22、工业机器人的视觉定位功能应用;
23、工业机器人的视觉整形功能应用;
24、RFID数据读写编程与调试;
25、AGV小车操作调试
26、智能仓库进出料操作
27、离线编程仿真软件操作实验;
配置清单
|
序号 |
名 称 |
主要指标 |
数量 (套) |
|
1 |
机器人基础模块 |
一、机器人参数(国产) 1、动作自由度:6 2、最大负载:6kg 3、工作范围:700mm 4、手腕法兰面:800mm 5、最大范围: a)J1±170° b)J2-60°~+160° c)J3-65°~+210° d)J4±180° e)J5±135° f)J6±360° 6、最大运动速度 a)J1444°/s b)J2444°/s c)J3444°/s d)J4441°/s e)J5441°/s f)J6706°/s 7、重复定位精度:±0.02mm; 8、本体重量:<30kg; 9、★双核四线程处理器系统,X86架构,主频>2.4GHz; 10、控制软件,linux实时操作系统; 11、32G固态+2G内存; 12、★控制总线EtherCat; 13、其它总线ModbusTCP,ModbusRTU; 14、IO端口,支持EtherCatIO扩展板卡,16入/16出,可扩展至128端口;输入端口自适应NPN/PNP输入。 15、通信接口:2路RS485,3路RS232,1路RJ45以太网,1路RJ45EtherCAT,USB2路; 16、8寸触摸屏的示教器,形象直观的人机接口,全功能盘、手轮功能。 17、支持拖动示教、虚实联动功能、视觉模块 二、工作平台 1、综合台由方管搭建而成,表面喷塑处理,上部采用铝型材; 2、外形尺寸:2000×1200×1420mm; 3、两侧装有安全护栏和安全光栅; 4、控制板采用网孔板倾斜安装; 三、机器人快换平台 快换平台包含四种以上不同的工装夹具,包括气爪工装、真空吸盘工装、TCP针工装、和画笔工装等。采用标准的气动快换夹具。 1、夹爪工装:快换连接法兰工装和夹块由铝合金表面喷砂氧化制成,夹爪气缸能满足抓取多个工件要求,包括工件底座、工件盒盖和工件总成。 2、真空吸盘工装:快换连接法兰工装和吸盘工装由铝合金表面喷砂氧化制成,真空吸盘直径15mm,气路自动对接。 3、TCP针工装:快换连接法兰工装和TCP针由铝合金表面喷砂氧化制成。 4、画笔工装:工快换连接法兰工装和画笔工装由铝合金表面喷砂氧化制成,画笔可浮动。 5、外形尺寸:200X200X180mm。 四、码垛、轨迹、原点示教平台 1、外形尺寸:250X200X180mm。 2、平台采用铝合金表面喷砂氧化制作成,具有码垛、走曲线轨迹图和原点示教功能。码垛包括圆形、正方形、三角形等多种不同形状的工件,曲线为S型,平台上可安装TCP针进行原点示教。 五、画图写字平台 1、外形尺寸:250X200X180mm。 2、平台采用铝合金表面喷砂氧化制作成,在平台板上安装一块写字板,平铺A4纸,用磁钢吸附,可以进行写字演示。写字板用高头滚花螺丝固定于轨迹模拟板,便于装卸。 六、机械整形装配平台 1、外形尺寸:200X200X180mm。 2、平台采用铝合金表面喷砂氧化制作成。平台平面有2个凹槽定位边,通过气缸对工件进行整形定位。一个是圆形工件整形,一个是工件底座整形。整形气缸对工件底座固定后,进行装配。 七、振动盘 1、振动盘出料速度30个/min;有出料检测装置。 2、振动频率可以通过控制器调节。 3、插销能自动排列出料。八、气动系统 1、40L空气压缩机,1台 2、配套电磁阀、真空发生器、配件若干 |
1套 |
|
2 |
视觉模块 |
(一)、工业相机及镜头: 1、★提供彩色相机,≥500万像素,分辨率≥2590 ×2048。 2、千兆以太网接口可提供1Gbps带宽,最大传输距离可到100m。 3、128MB板上缓存用于突发模式下数据传输或图像重传。 4、支持软件触发/硬件触发/自由运行等多种模式。 5、支持锐度,降噪,伽马校正,查找表,黑电平校正,亮度,对比度等ISP功能。 6、植入插值算法和白平衡算法,颜色转换矩阵,色度,饱和度。 7、支持多种图像数据格式输出,ROI,Binning,镜像等。 兼容GigeVision协议和GenICam标准。 8、支持POE供电,DC(6-24V)宽压供电。 9、符合CE、FCC、UL、RoHS认证。 10、镜头焦距(mm):≥8 11、光圈范围:F1.2-F16或更优 12、最小物距(m):≤0.1 13、镜头接口:C (二)、视觉光源: 1、可控LED环形正光源,尺寸内孔40mm,外径90mm; 2、电源DC24V (三)、视觉主机: 1、i3以上CPU、内存4G及以上、硬盘32GB及以上。 2、显示器,10寸工业显示器; 3、★视觉主机通过网线或RS232与上位机通信。通过ModbusRTU或ModbusTCP协议,上位机触发相机拍照,及把视觉检测结果反馈到上位机。 4、定位工具:基于点线的定位,基于Blob的定位,基于图案的匹配及定位,基于轮廓的匹配及定位,多Blob及多轮廓定位; 5、检测工具:基于灰度特征的存在性检测,基于 Blob特征的检测及计数,几何特征拟合,边缘及轮廓搜索,基于颜色特征的检测及分类,轮廓、直线度、真圆度检测; 6、测量工具:几何特征之间距离及夹角检测,多边对距离及夹角检测; 7、预处理工具:灰度处理,ROI处理,颜色提取 8、★视觉系统与机器人通过ModbusTCP通讯,支持视觉系统到机器人坐标转化。更换机器人位置后,重新标定位置转化就能正常位置。 9、★视觉处理流配置方便,只需要在现场配置视觉处理流就可实现新的业务处理; 10、★调试功能:支持图象变量功能,能查看每步 处理过程图像的变象,提高调试效率; |
1套 |
|
3 |
RFID模块 |
RFID射频识别模块:★RFID模块,能够将企业应用的信息化技术应用到搬运工件中,通过信息管理系统将工件信息写入工件中,当机器人搬运工件时,通过工件信息读取器,由总线传送给机器人,机器人根据读取的信息放入具体的工位。消耗电流:<100mA;电源要求:12V~24VDC。RFID直径大小ø25mm。 工作温度:0℃~65℃。 (一)、RFID读卡器: 1、一个RS485接口,带有3964传送程序,用于连接到PC系统、S7-1200、三菱等其他控制器。 2、工作频率为13.56MHz,电气数据最大范围为135mm,通信接口标准为RS485,额定电压为DC24V,电缆长度为30M。 4、采用西门子RFID数据传输系统。 5、检测距离为40mm。 (二)、RFID读卡器的通信协议 1、★modbus协议通信;(且不可更改) 2、数据长度:8位; 3、传输速率为:19200bps; |
1套 |
|
4 |
直线流水线模块 |
(一)、直线流水线 1、流水线主体采用型材结构。 2、采用变频器控制电机传输。 3、功率:15W,电压:单相220V,轴径:6-15mm,调速范围:1300-90r/min,传送带:830(两轴间距)*69(宽)*2(厚度)mm。 4、同步带及同步轮齿形:XL。 (二)、二工位井式上下料 1、工件底座和工件盒盖自动出料。采用井式仓库 通过气缸依次推出。井式仓库需检测是否有料。检测方式为侧面对射型,光电传感器,内置小型放大器型光电传感器实现检测,检测距离5mm~150mm,光源为红外发光二极管。 2、★工件底座和工件盒盖随着流水线流动,经过视觉模块,由机器人跟随抓取。 3、井式仓库需可视且方便往里加料。 4、井式上下料:最高使用压力:0.7MPA,缓冲:垫缓冲。带磁性开关。 |
1套 |
|
5 |
环形流水线模块 |
(一)、环形流水线 1、流水线主体采用型材结构,63柔性链条,中间驱动器,180度弯头。 2、采用变频器控制电机速度。 3、采用优质涡轮蜗杆电机,功率:0.37KW,电压:三相220V,速度:10-15/分钟。环形线:800(两轴间距)*368(宽)mm。 (二)、四工位圆形井式上下料 1、圆形工件自动出料,工件为圆柱形内嵌RIFD,工件分四种颜色,分别是红色、蓝色、黑色,白色。采用透明井式仓库通过气缸依次推出。井式仓库需检测是否有料。检测方式为侧面对射型,检测距离 5mm~150mm,光源为红外发光二极管。 2、★圆形工件随着环形线流动,经过RFID模块, RFID检测系统可以准确地读取工件内的标签信息,如编号、颜色、高度等信息,该信息通过工业现场数据总线传输给PLC,来实现工件的分拣操作。对射传感器检测到工件后,机器人根据RFID的信息将工件拿到对应的位置。检测方式为侧面对射型,光电传感器,内置小型放大器型光电传感器实现检测,检测距离5mm~150mm,光源为红外发光二极管。 3、井式仓库需可视且方便往里加料。 4、井式上下料模块:最高使用压力:0.7MPA,缓冲:垫缓冲。带磁性开关。 |
1套 |
|
6 |
AGV小车模块 |
(一)、AGV小车跑道 1、AGV跑道平台采用铝合金表面喷砂氧化制作成,跑道为黑色环形圈,中心间距230mm,内边宽344mm,跑道宽18mm。 2、AGV小车跑道平台外形尺寸730X580X70mm。 (二)、AGV小车 1、★AGV小车用于把组装好的产品,输送到智能仓库,AGV控制器通过与机器人控制器通信,获取生产完成的产品信息,或生产需要的原材料信息,自行与智能仓库对接,把组装完成的产品,通过AGV运到立体仓库入库。 2、★AGV小车控制系统由有以STC89C52作为核心的主控器模块、稳压电源模块、红外检测模块、电机及驱动模块、显示模块、声光报警模块等部分组成,控制系统的结构框图如图所示。从单片机发出 PWM波,驱动直流电机对小车进行加减速控制以及控制电机对小车进行转向。为了对小车的速度进行控制,在小车电机齿轮旁安装编码盘,采集电机转速的脉冲信号,经光电传感器捕获后来进行速度的一系列计算,完成小车速度的闭环控制。 ★AGV小车定位,通过2个条码,第一个右侧 条码表示接近,AGV采用慢速爬行。第2个条码,是2侧双条码,AGV检测到后停下来。PLC需要实时了解AGV小车是否到站。只有到站后,才能进行相应的操作。到站通过红外漫反电开关传感器检测。检测距离5mm~100mm,光源为红外发光二极管光电传感器,内置小型放大器型光电传感器。当AGV小车在站点时,则相应的传感器输出低电平。本产品2个站点,因此共2个传感器。 4、AGV小车用喷塑钣金罩起来,外形尺寸235X145X1110mm。 |
1套 |
|
7 |
立体仓库模块 |
(一)、立体仓库 1、采用型材构架,支持3X4的12格库位,每格120X120mm。 2、外形尺寸440X160X745mm。 3、每个库位有传感器检测是否有料,可在线知道库位状态,是否空闲,通过红外漫反电开关传感器检测。检测距离5mm~100mm,光源为红外发光二极管光电传感器,内置小型放大器型光电传感器。 (二)、堆垛机 1、满足横向与纵向两个方向快速移动,并配带有前后伸缩和旋转夹紧的货叉平台,通动移动货叉平台可以到立体仓库的任意一个库位,从而可以实现快速将物品从货架中取出或存入动作。快速移动采用同步带模组。驱动采用步进电机。 2、X轴同步移动模参数 a、最大扭矩50N.m; b、最大速度15m/s; c、水平最大承载力1000N; d、导程(同步轮周长)125mm; e、同步带规格:聚氨酯钢线HTD5m,宽度25mm; f、同步带轮齿数:25齿; 3、Z轴同步移动模组参数 a、最大扭矩0-3N.m; b、最大速度0-1m/s; c、水平最大承载力100N; d、导程(同步轮周长)72mm; e、同步带规格:聚氨酯钢线HTD3m,宽度15mm; f、同步带轮齿数:24齿; 4、★具有过流过热保护装置、堆垛机寻址控制系统、总线通讯方式与上位机通信、可与ERP、WMS管理软件实现无缝对接,在堆垛机的控制面板上设有自动/单机开关以选择工作方式。手动方式上用户可使用操作面板上的相应的按钮直接控制堆垛机的水平运行,载货台的上下升降及货叉的左右伸缩以便于用户安装调试和维修。 |
1套 |
|
8 |
教学资源 |
1、实训手册一套、配套试卷一套、标准微课一套。 |
1套 |